

Introducción
En los últimos años los escáneres láser móviles basados en tecnología SLAM (Simultaneous Localization and Mapping) se han convertido en una herramienta cada vez más utilizada en topografía, ingeniería y digitalización 3D.
Estos sistemas permiten capturar grandes cantidades de información espacial simplemente caminando con el sensor, generando nubes de puntos tridimensionales en muy poco tiempo.
A diferencia de los escáneres láser estáticos tradicionales, donde el instrumento debe colocarse en múltiples posiciones fijas, los sistemas SLAM funcionan de forma dinámica. El operador se desplaza por el entorno mientras el sensor registra millones de puntos por segundo y el algoritmo calcula simultáneamente la posición del escáner dentro del espacio.
Este cambio en la forma de capturar datos ha permitido reducir de forma drástica los tiempos de trabajo en muchos levantamientos.
Por ejemplo, un tramo de calle de 200 metros que con métodos tradicionales podría requerir varias horas de medición con estación total
o GNSS puede registrarse con un escáner SLAM en apenas unos minutos.
Qué es el algoritmo SLAM
SLAM significa Simultaneous Localization and Mapping, que puede traducirse como localización y mapeo simultáneo. Se trata de un conjunto de algoritmos capaces de resolver un problema complejo: determinar la posición de un sensor dentro de un entorno desconocido mientras se construye un mapa tridimensional de ese mismo entorno.
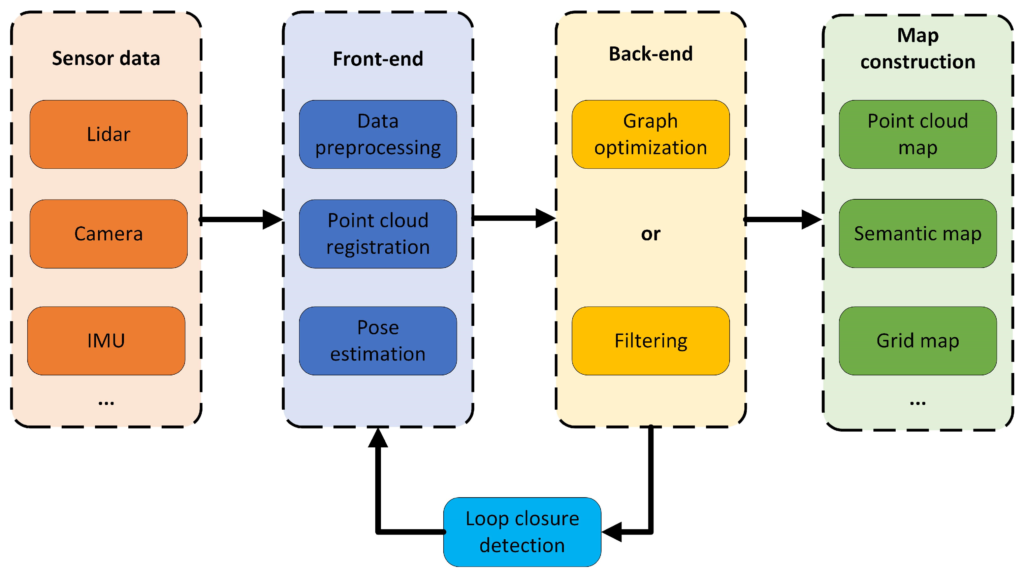
En los escáneres láser móviles utilizados en topografía, el sistema combina información procedente de varios sensores:
• Sensor LiDAR, que captura la geometría del entorno mediante pulsos láser
• IMU (unidad de medición inercial), que mide aceleraciones y rotaciones
• Cámaras o sensores visuales en algunos equipos
• GNSS o RTK en sistemas híbridos para georreferenciación
El algoritmo utiliza todos estos datos para estimar de forma continua la trayectoria del sensor mientras se genera la nube de puntos.
Cómo calcula el sistema la trayectoria
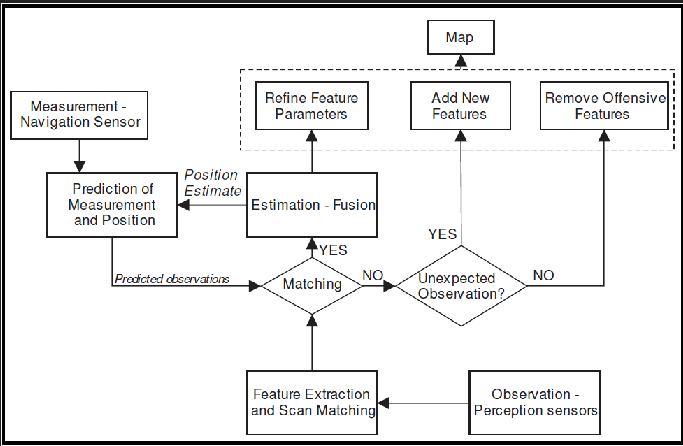
El funcionamiento del SLAM puede entenderse como una secuencia de procesos que se repiten continuamente durante la captura.
Primero, el sensor LiDAR registra una nube de puntos del entorno. Cada escaneo representa una instantánea tridimensional del espacio.
Después, el algoritmo compara ese escaneo con los anteriores para detectar elementos comunes del entorno: fachadas, árboles,
vehículos, farolas u otros elementos geométricos.
Si el sistema detecta esos elementos en diferentes escaneos, puede estimar cómo se ha desplazado el sensor entre una captura y la siguiente. A partir de esa información se construye una trayectoria inicial del recorrido.
Sin embargo, esta trayectoria contiene pequeños errores acumulados. Para corregirlos, el sistema construye lo que se conoce como
un grafo SLAM, una estructura matemática donde cada posición del sensor se representa como un nodo conectado con las posiciones anteriores.
Finalmente, el algoritmo optimiza ese grafo para minimizar el error global y mejorar la coherencia geométrica de la nube de puntos.
Por qué el recorrido del operador es tan importante
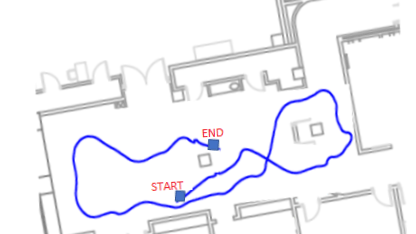
Una característica clave de los sistemas SLAM es que la calidad del resultado depende en gran medida de cómo se realiza el recorrido durante la captura. El algoritmo funciona mucho mejor cuando el sensor vuelve a observar zonas que ya ha escaneado anteriormente. Este fenómeno se conoce como loop closure.
Cuando el sistema detecta que está viendo el mismo lugar otra vez, puede corregir el error acumulado en la trayectoria
y mejorar significativamente la precisión global.
Por esta razón, en levantamientos urbanos suele ser recomendable evitar recorridos largos en línea recta y realizar trayectorias
que incluyan cruces, cambios de dirección o recorridos en forma de bucle.
Ventajas del SLAM en topografía
La principal ventaja de los escáneres SLAM es la productividad. Permiten capturar grandes áreas en muy poco tiempo,
generando una nube de puntos completa del entorno.
Entre sus aplicaciones más habituales se encuentran:
• Levantamientos urbanos
• Digitalización de edificios
• Modelado BIM
• Documentación de patrimonio
• Inspección de infraestructuras
En muchos proyectos el tiempo de captura puede reducirse de horas a minutos.
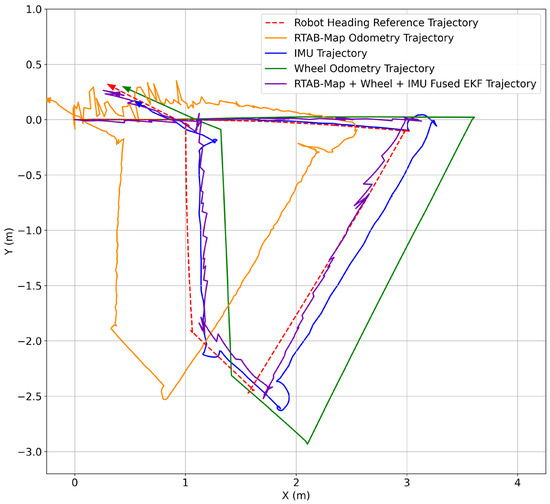
Limitaciones de los sistemas SLAM
A pesar de sus ventajas, los sistemas SLAM también presentan algunas limitaciones que es importante conocer.
La más conocida es la deriva acumulada en recorridos largos. Si el sensor se desplaza durante demasiado tiempo
sin volver a zonas previamente escaneadas, pueden aparecer pequeños errores en la trayectoria.
También pueden aparecer dificultades en entornos con geometría muy repetitiva o con pocas referencias tridimensionales.
Por este motivo, en proyectos de ingeniería donde se requieren precisiones más estrictas es habitual combinar el SLAM con puntos de control topográficos medidos con GNSS o estación total.
Conclusión
Los escáneres láser móviles basados en SLAM representan una evolución importante en la captura de datos espaciales.
Permiten registrar grandes cantidades de información tridimensional con una rapidez muy superior a los métodos tradicionales.
Aunque no sustituyen completamente a la topografía clásica, sí se han convertido en una herramienta complementaria muy potente para muchos tipos de levantamiento.
Con la mejora continua de sensores, algoritmos y capacidad de procesamiento, todo apunta a que el uso de SLAM seguirá creciendo en los próximos años dentro del sector de la geomática y la ingeniería.
0 comentarios